موتور - پروژه کنترل موتور DC توسط سنسور های مادون قرمز
آموزش ساخت کنترلر دور و جهت موتور آرمیچر DC با ریموت IR با آردوینو
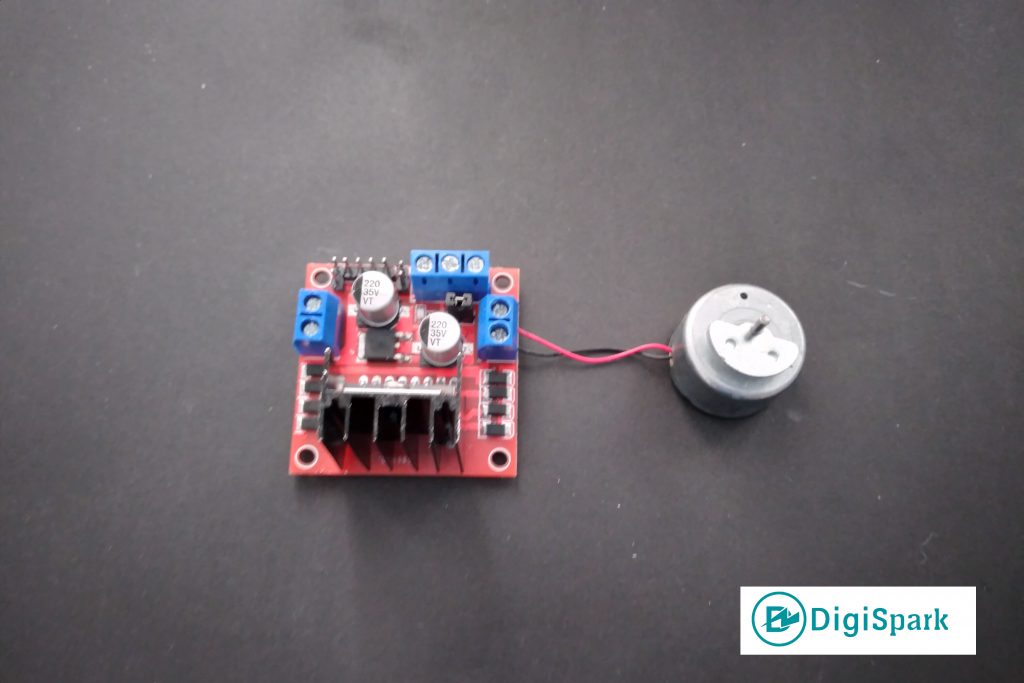
البته، در این آموزش(لینک آموزش، کلیک کنید) پیشتر همکارم به کنترل سروو موتور از طریق ریموت IR پرداخته است، اما در این آموزش ما به کنترل دور و جهت چرخش یک موتور DC معمولی کوچک، می پردازیم. ریموت کنترل های IR، ریموت کنترل هایی با اندازه و ابعاد مختلفی هستند که برای کنترل وسایل مختلف، نظیر وسایل صوتی و تصویری، سیستم های گرمایشی و سرمایشی، هود های صنعتی و یا خانگی و…. در این قسمت، به اجرای پروژه می پردازیم در این پروژه، به کمک دکمه + دور موتور را افزایش، به کمک دکمه – دور موتور کاهش و به کمک دکمه های جلو و عقب، جهت موتور را کنترل خواهیم نمود. سپس در آموزشی دیگر، دور و جهت موتور مورد نظر را از طریق اینترنت GPRS ماژول SIM808 و به کمک یک وب سایت (لینک آموزش، کلیک کنید) که از پیش برای همین منظور طراحی نموده ایم، کنترل کردیم.

به این ترتیب می توانیم با ساختار کنترل موتور در دستگاه مختلف نظیر کولرهای گازی، هودهای آشپزخانه و … آشنا شده و در پروزه های خود، از این قابلیت استفاده نماییم. اتصال پایه ENA به پایه GPIO6 (توجه کنید، در صورتیکه بر روی این پایه جامپر وجود دارد، این جامپر را برداشته و پایه ای که به سمت بیرون است را به پایه GPIO6 متصل کنید). همچنین، با فشردن دکمه های زیاد و یا کم، دور موتور کم وزیاد شده و با انتخاب دکمه های جلو و عقب بر روی ریموت کنترل، جهت گردش موتور تغییر خواهد یافت. ریموت کنترل های IR در دستگاه های بسیاری نظیر تلویزیون ها، هودها، کولرهای گازی و یا به طور کلی سیستم های گرمایشی، سرمایشی، به وفور استفاده می شود.
روال کلی کار به این صورت است که پس از دریافت کد ارسال شده از ریموت، ابتدا کد دیکد شده و بر مبنای دکمه فشرده شده، دور و جهت موتور کنترل خواهد شد. چنانچه در مراحل راه اندازی و انجام این پروژه با مشکل مواجه شدید، بدون هیچ نگرانی در انتهای همین پست، به صورت ثبت نظر سوالتان را مطرح کنید. در این آموزش، به طراحی و پیاده سازی پروژه ای پرداختیم که به کمک آن، قادر به کنترل دور و جهت موتور DC از طریق ریموت کنترل IR، خواهیم بود. در این پروژه ما نیز به طراحی و پیاده سازی سیستمی پرداختیم که به کمک آن می توان از طریق ریموت IR، به کنترل دور و جهت یک موتور DC پرداخت. به عنوان مثال، در این آموزش(لینک آموزش، کلیک کنید)، ابتدا تحت ویندوز، یک برنامه نوشتیم و به کمک آن دور و جهت موتور را کنترل نمودیم.
انجام پروژه های الکترونیکی کنترل بی سیم موتور DC با RF | انجام پروژه های الکترونیکی
علت بالا بودن قیمت این محصول نسبت به نمونه های مشابه صنعتی موجود در بازار که در تعدا بالا تولید و توزیع می شوند این است که این مورد کاملا سفارشی و به صورت دست ساز بعد از سفارش مشتری اقدام به ساخته می شود و هیچ کدام از نمونه های آموزشی از قبل ساختته شده و انبار نشده است و همچنین همراه این پروژه توضیحاتی متنی تحت فایل WORD که شامل شرح تمام قسمت های پروژه است ارائه می شود. برای تهیه برد مدار چاپی روش های مختلفی وجود دارد، ولی در این پروژه از روش چاپ و اتو به صورت کاملا دستی استفاده شده و بر روی برد از مارکاژ و پوشش محافظ سبز استفاده نشده است. • توضیحات کامل از پروژه ، تحت فایل Word ، که در آن نحوه راه اندازی پروژه ، شماتیک مدار ، برنامه میکروکنترلر و روش ساخت برد پروژه ، به صورت مصور شرح داده شده است.

توجه: در این پروژه از فیدبک استفاده نشده است و در صورتی که موتور تحت بار قرار بگیرد ، دور آن کم خواهد شد و پروژه توانایی تشخیص این مسئله را ندارد. از آنجایی که موتور های الکتریکی مصرف کننده های سلفی هستند، در زمان START و یا STOP کردن موتور ، نویز شدیدی به مدار القاء می شود. این محصول با نمونه های صنعتی که دارای قاب بوده و برد آن ها جهت محافظت از گرد و غبار داری پوشش محافظ سبز است متفاوت می باشد. توجه: به علت استفاده از پل دیودی در طراحی این پروژه، می توان از منابع تغذیه AC نیز جهت راه اندازی این پروژه استفاده کرد. و مشکل اساسی در استفاده از موتورهای الکتریکی، نویز شدید ایجاد شده توسط موتور های الکتریکی می باشد.

در این پروژه می توان یک موتور DC را بدون هیچ مشکلی چپ گرد و راست گرد کرده و سرعت آن را کم و زیاد کرد. توجه: این پروژه الکترونیکی در مدل دانشجویی و به صورت دست ساز تهیه شده است و فقط جنبه آموزشی دارد. با استفاده از این پروژه، چپ گرد ، راست گرد و سرعت گردش موتور DC از راه دور قابل کنترل است. موتور های الکتریکی مصرف بالایی دارند و برای راه اندازی آن ها نیاز به درایور مناسب است. به منظور کنترل موتور DC در برد فرستنده از 5 عدد تک سوییچ مطابق شکل زیر استفاده شده است. جهت کد گذاری سیگنال های ارسال شده از تراشه های دیکدر PT2262 و انکدر PT2272 استفاده خواهد شد. درایور استفاده شده برای راه اندازی موتور الکتریکی از قسمت کنترلر کاملا ایزوله است.

پروژه ساخت درایور موتور برای روبات 4 چرخ
برنامه های کنترل این دستگاه با استفاده از فرآیند چند تکنولوژی ساخته شده است که ترکیبی از مدار کنترل دوگانه و CMOS با قدرت DMOS است. این درایور توسط دو ورودی سیگنال PWM و Dir برای حرکت در جهات مختلف کنترل می شود و قابلیت گردش 360 درجه را به روباتهای شما می دهد. این کیت ایده آل برای درایور موتورهای DC و Stepper بوده و شما را از طراحی بخش درایور موتورهای روباتتان بی نیاز میکند. توسط این کیت شما می توانید تمامی روبات های 4 چرخ رو در جهات جلو و عقب و چپ و راست کنترل کنید. شما میتوانید با اعمال سیگنال هایی به پایه های ورودی سیگنال , حرکت موتورها را کنترل کنید. بافر مورد نیاز در این کیت توسط آیسی LMD18201 طراحی شده که کنترل موتورها را برعهده میگیرد.

هر محور می تواند جریان بار تا 3 آمپر و ولتاژ 12V – 48 V DC را ساپورت کند. این سیگنال ها میتواند به صورت دستی یا با میکروکنترلرفرمان بپذیرند. در زیر نحوه ی اعمال سیگنال ها برای گردش به جهت دلخواه مشخص شده است. در تصویر زیر نحوه ی اتصال روبات به درایور رو مشاهده می کنید. پروژه ساخت فرکانس متر 100مگاهرتز با میکروکنترلر pic و نمایشگرLCD.
پروژه رایگان برق قدرت
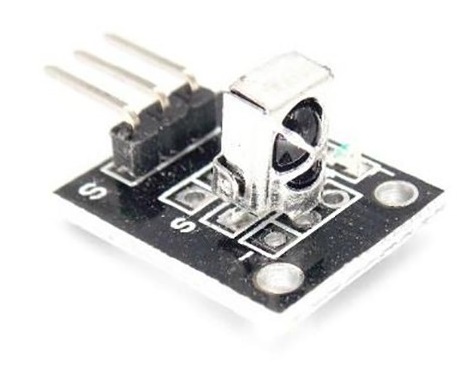
در فصول 1 تا 5 سعی شده است که با توضیح یک سری اصول کلی در مورد تئوری کنترل موتور های dc و همچنین آشنایی با قطعات مورد استفاده در پروژه یک دید کلی در مورد پروژه حاصل شود. هدف اصلی ساخت مدار کنترل موتور DC با میکروکنترلر AVR آشنایی با شیوه های کنترل انواع موتورهای dc و اعمال انواع فرمان های کنترلی به انها توسط میکروکنترلرهایAVR می باشد. در انتها هم 2 پیوست آورده شد است که در پیوست1 متن برنامه آورده شده و در پیوست2 دیتا شیت های مورد نیاز پروژه آورده شده است. (اندازه گیری غیر مخرب)یکی از روش های کنترل سرعت موتورDC استفاده از (Pulse Width Modulation) یا همان PWM می باشد. یکی از روش های مستقیم اندازه گیری سرعت موتور استفاده از فرستنده گیرنده مادون قرمز است.

یکی از روش های مستقیم اندازه گیری سرعت موتور استفاده از فرستنده گیرنده مادون قرمز است. از مزایای این روش این است که سنسور بر روی عملکرد عادی دستگاه تاثیر نمی گذارد. از مزایای این روش این است که سنسور بر روی عملکرد عادی دستگاه تاثیر نمی گذارد. پروژه ساخت مدار کنترل موتور DC با میکروکنترلر AVR در 8 فصل شرح داده شده است. لینک دانلود فایل word بعد از پرداخت مبلغ به صورت آنی برای شما فعال میشود. دانلود مستقیم : ساخت مدار کنترل موتور DC با میکروکنترلر AVR. دانلود کمکی : ساخت مدار کنترل موتور DC با میکروکنترلر AVR. فایل pdf پروژه را از قسمت فوق به صورت رایگان دانلود و مشاهده کنید.
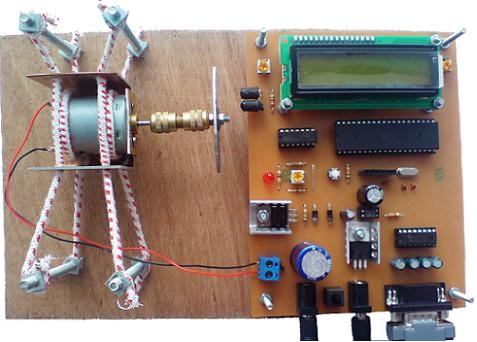
در فصل 7 هم به نتیجه گیری و برنامه پروژه نهایی پرداخته ایم. مرا از جواب و نظرات بعدی این مطلب به وسیله ایمیل با خبر کن !.